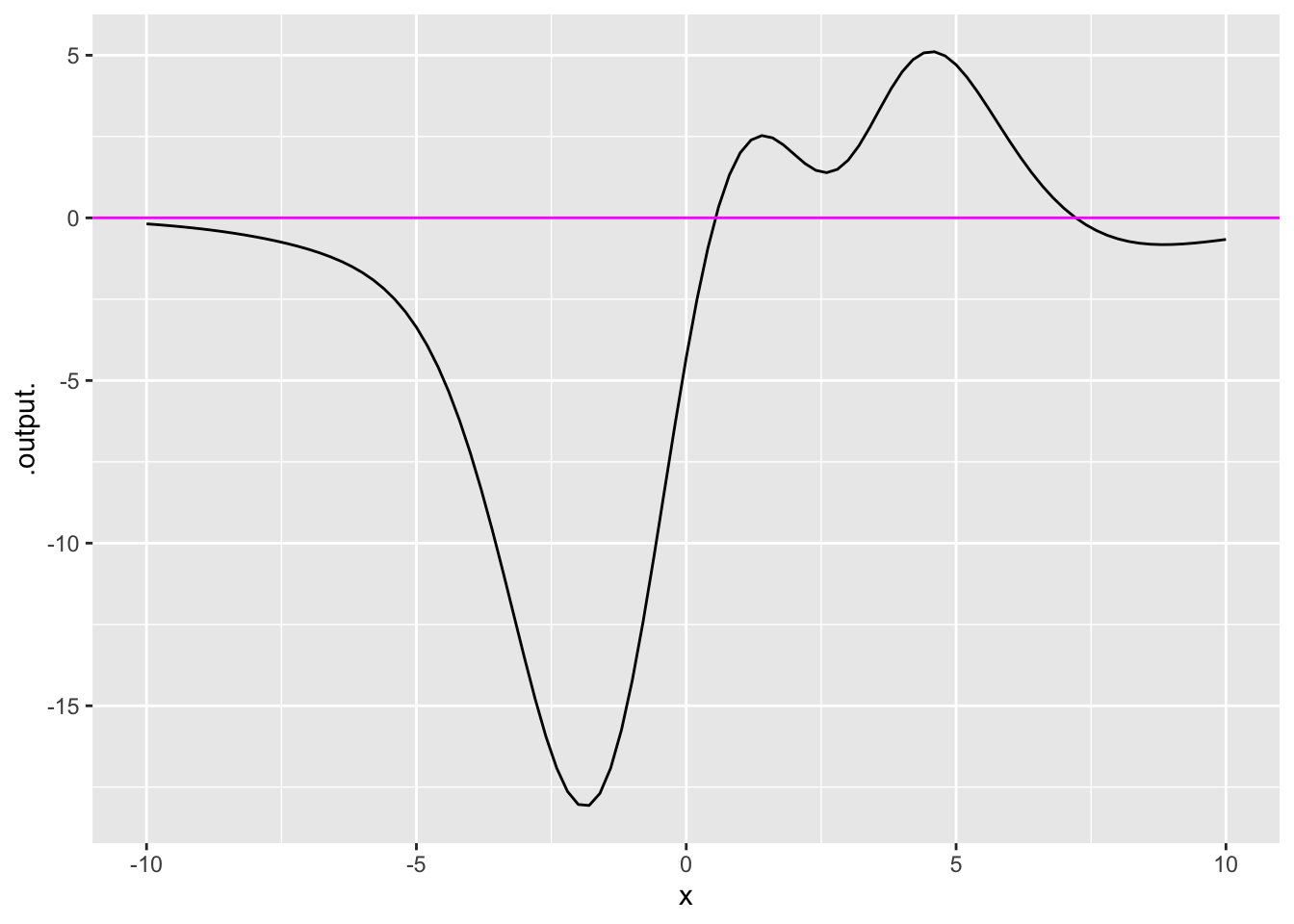
Exercise 1Active R chunk 1 defines a dynamical function named \(f()\). The differential equation \[\partial_t x = f(x)\ .\] has two fixed points which you can easily find by graphing \(f()\). Add R/mosaic statement to Active R chunk 1 that will locate all of the fixed points in the interval \(-10 \leq x \leq 10\). For each fixed point find the stability (stable or unstable) and find the parameter in the exponential solution \(e^{at}\) near the fixed point. (Hints: Zeros() and D().)
Active R chunk 1
Answer
f <-doodle_fun(~ x, seed=385)slice_plot(f(x) ~ x, bounds(x=-10:10)) %>%gf_hline(yintercept =~0, color="magenta")
# A tibble: 2 × 3
x .output. slope
<dbl> <dbl> <dbl>
1 0.542 -0.000103 6.10
2 7.22 0.000000706 -1.22
Exercise 2 Consider the first-order differential equation
\[\partial_t V = g(V)\] with a fixed point at \(V^\star\).
For each of the following mathematical objects, say whether the object is a function or a number.
\(V\)
a function a number
question id: finch-write-fridge-1
\(g()\)
a function a number
question id: finch-write-fridge-2
\(\partial_t V\)
a function a number
question id: finch-write-fridge-3
\(V^\star\)
a function a number
question id: finch-write-fridge-4
Exercise 3 In the cows eating grass model, we proposed the model \[ \partial_t v = \frac{v}{3} \left(1-\frac{v}{25}\right)\] for the growth of grass in the field, where \(v\) is in tons of biomass and \(t\)
According to the model, what is the carrying capacity for grass in the field?
12.5 tons 25 tons 50 tons none of the above
question id: hamster-dive-window-1
The field is most productive when the grass is growing at the highest rate possible. At what level of vegetation biomass is the biomass increasing the most rapidly?
12.5 tons 25 tons 50 tons none of the above
question id: hamster-dive-window-2
At that most productive level of biomass, what is the rate of growth of the vegetation? (Make sure to give units.)
2 tons
2 tons-per-day
2 days-per-ton
12.5 tons
12.5 tons-per-day
12.5 days-per-ton
question id: hamster-dive-window-3
Exercise 4 Consider a hay field that has just been harvested in the middle of summer. The grass has been cut short and the weather is still conducive to growth. What’s going to happen?
The grass will grow back, a very simple model of which will be \(\partial_t G(t) \equiv C\). This rate, \(\partial_t G(t)\), corresponds to the grass growing back at a constant rate. Imagine we measure this rate as tons of biomass per day, and measure time \(t\) in days.
To model the everyday real world of growing grass, should \(C\) be positive or negative?
positive
negative
zero
question id: pine-win-oven-1
What units does the output \(G(t)\) have?
tons per day
tons
days
tons/day^2
question id: pine-win-oven-2
Which of these equations best describes the trajectory of the growing grass under the \(\partial_t G(t) = C\) dynamics?
\(G(t) = G(0) + C\)
\(G(t) = G(0) + C t\)
\(G(t) = G(0)\sin(t/C)\)
\(G(t) = G(0) t + C\)
question id: pine-win-oven-3
According to the dynamics \(\partial_t G(t) = C\), what will \(G(t)\) look like (without future harvesting)?
Growth until the field is choked up with grass.
Growth without limit.
Oscillating growth and decline as the seasons pass.
question id: pine-win-oven-4
There are two obvious shortcomings of the model \(\partial_t G(t) = C\). First, when the amount of grass is very small (think little spouts spread widely apart) growth should much smaller than when the grass is plentiful. Second, at some point the grass is so dense that further growth is impossible, so \(\partial_t G(t)\) falls to zero (or even negative). The maximum amount of biomass that can be sustained by the field is called the grass’s carrying capacity.
The standard simple model for a system with growth to a carrying capacity is \[\partial_t G(t) = r G(t)(K-G(t))\] This model is famous and has a name: logistic growth.
The logistic growth model has two fixed points. What are they?
\(G=0\) and \(G=K\)
\(G=0\) and \(G=1/K\)
\(G = \pm K\)
\(G=0\) and \(G=-K\)
question id: pine-win-oven-5
Which of these stories best describes the trajectory of the logistics growth version of \(G(t)\) starting with \(G(0)\) very small but positive?
The grass grows slowly at first, then gradually growth speeds up and stays high.
The grass grows rapidly at first then declines gradually to no growth.
The grass grows slowly, then grows faster until it reaches a biomass where the growth rate declines steadily to zero.
question id: pine-win-oven-6
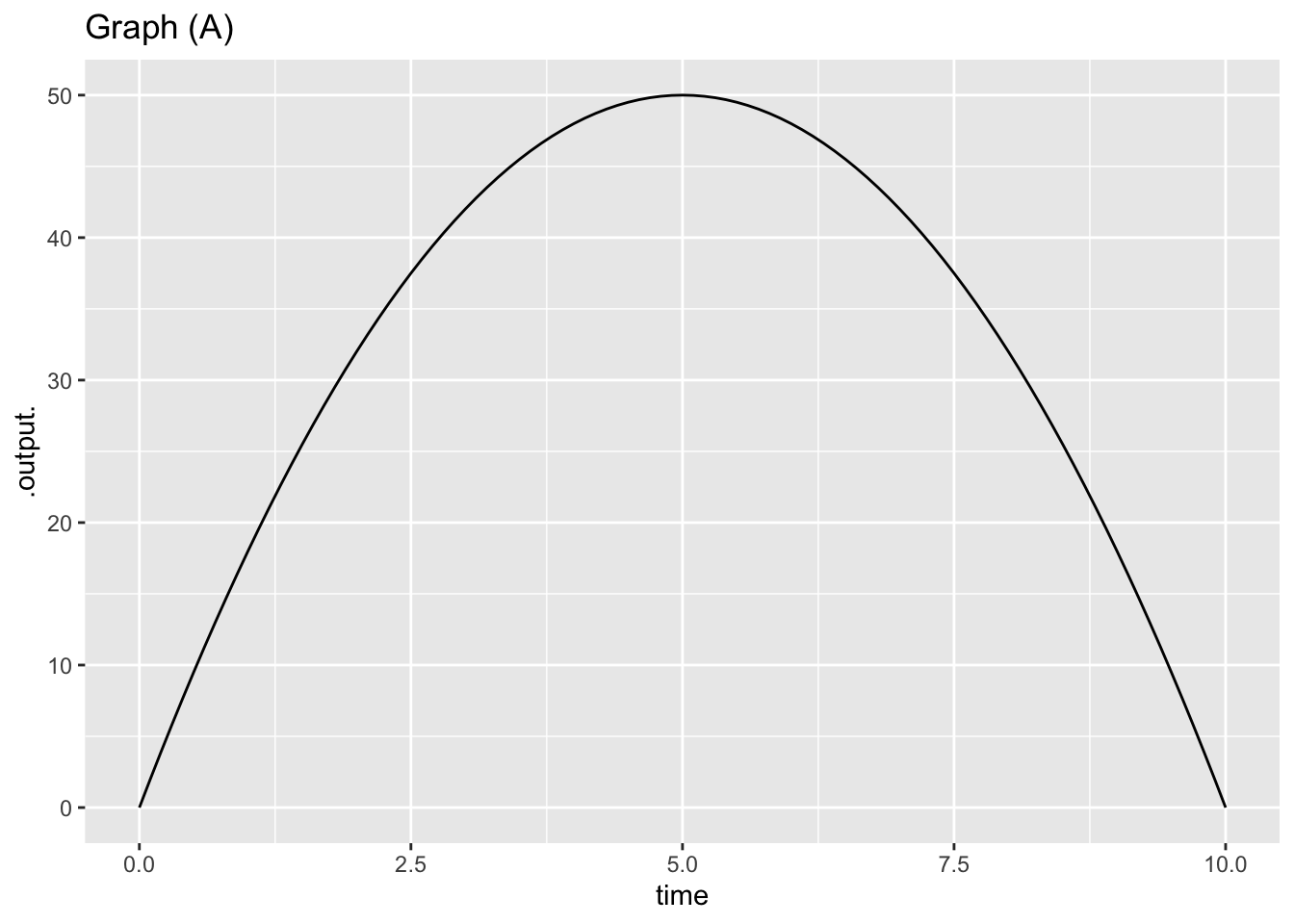
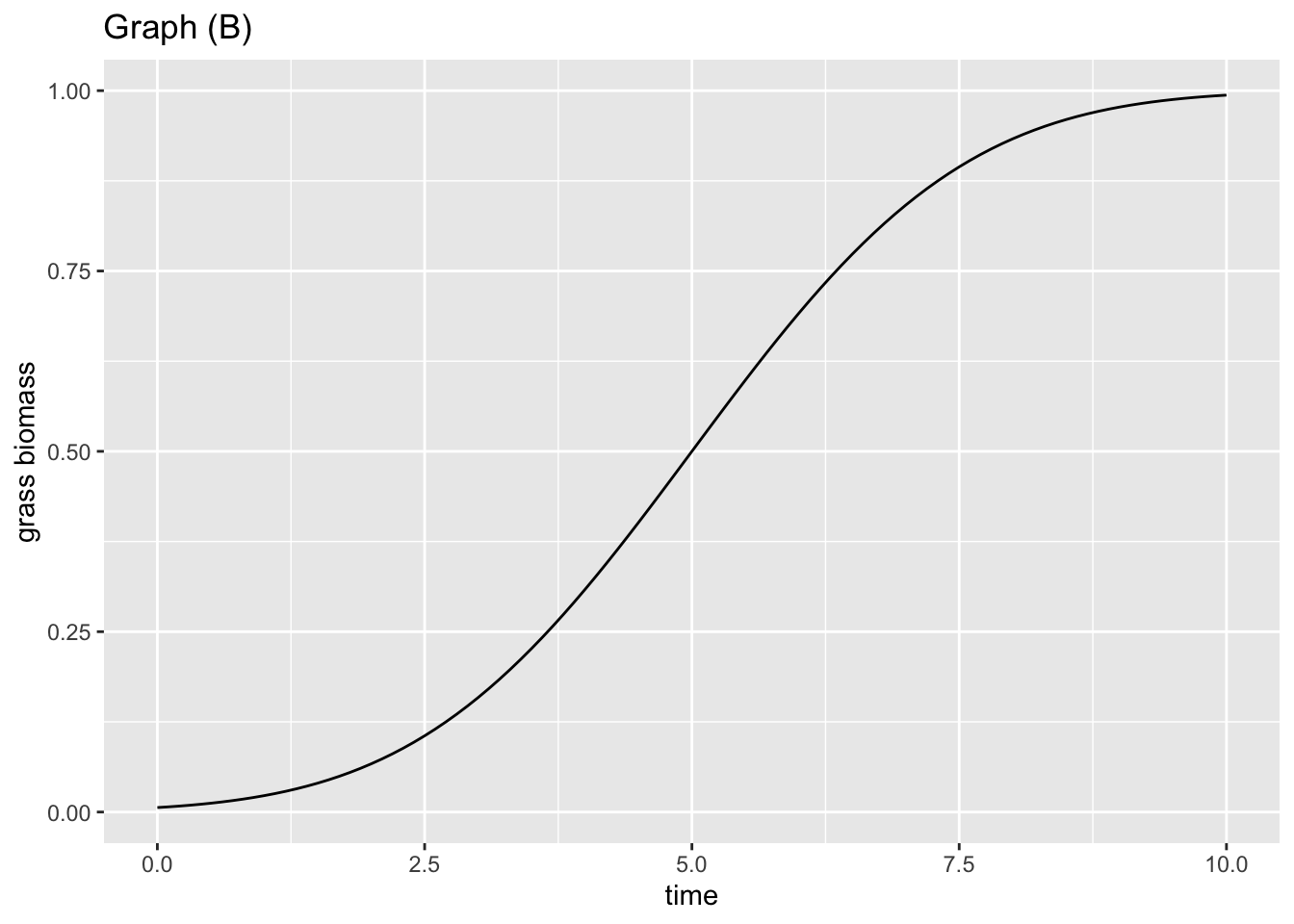
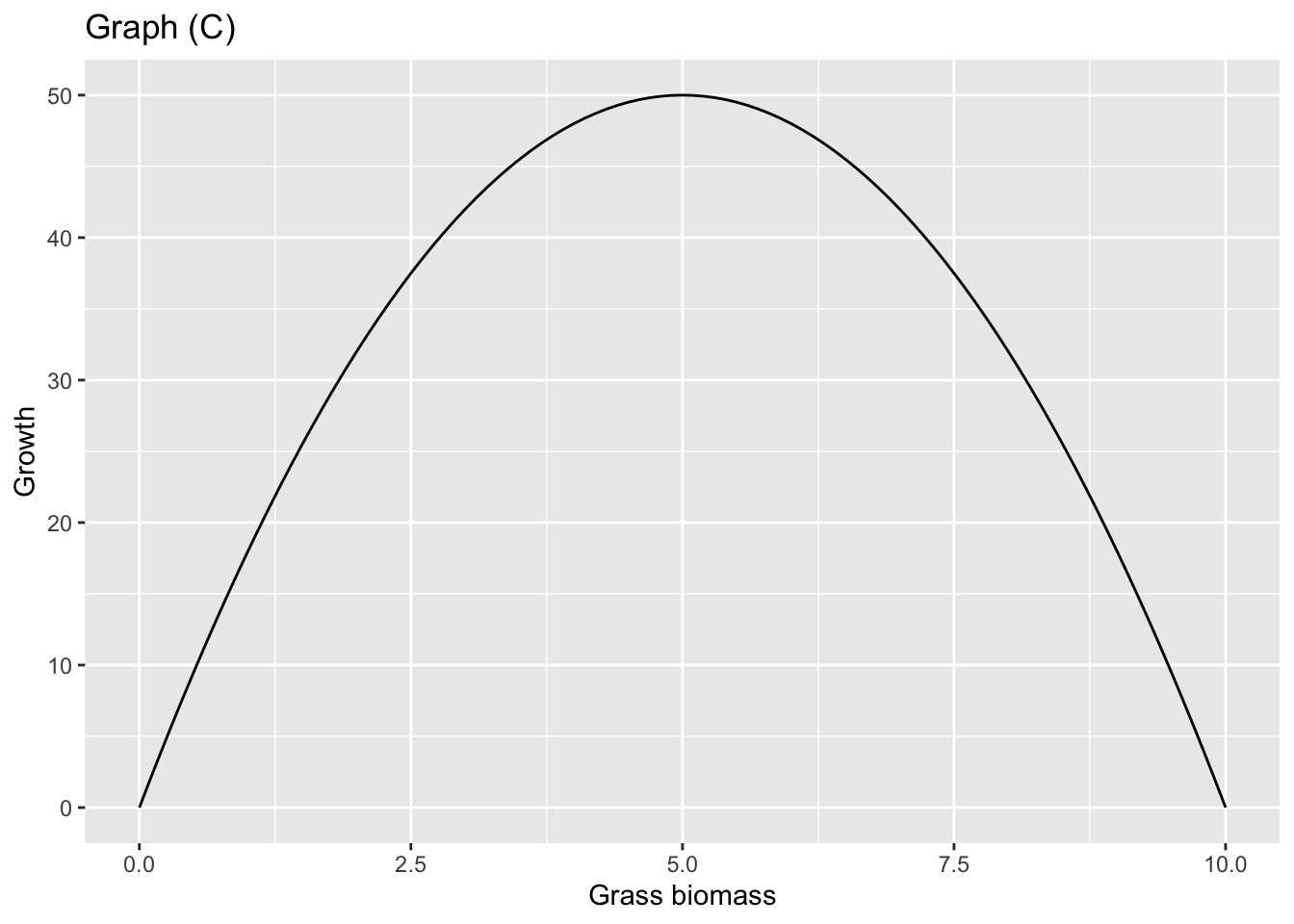
Here are three graphs.
Which of the graphs represents a possible trajectory \(G(t)\)?
A B C none of them
question id: pine-win-oven-7
Exercise 5 Consider the differential equation \[\partial_t x = \sin(x)^2 + x + 1\ .\]
Where is the fixed point?
t = -1.9 t = 1.9 x = -1.9 x = 1.9 There is no fixed point.
question id: calf-dive-pot-1
Which of these functions should be evaluated at the fixed point to assess its stability?
Exercise 6 The interactive app displayed below implements a version of the pasture-cow dynamics with different parameters than the one in the main body of the text.
The app draws the various functions involved:
The intrinsic logistic model growth dynamics with no cows.
The total consumption by the herd of cows.
The net growth, which is the difference between (1) and (2).
And, you can play the role of farmer by changing the herd size.
Using the app, answer these two questions:
Put one cow in the field. Judging from the net dynamics, what will be her condition?
well-fed
starving
in between
question id: bird-grow-sheet-1
Graze a total of ten cows in the field. These will reduce the biomass carrying capacity. What is that capacity with ten cows?
1.2 tons/day
7 tons
7 tons/day
12 tons
22 tons
22 tons/day
question id: bird-grow-sheet-2
How many cows can you put in the pasture before the addition of even a single additional cow will cause collapse of the ecosystem?
6 13 17 22 25 29
question id: bird-grow-sheet-3
Once a collapse has occurred, how many cows will you need to remove in order for the pasture to show growth toward a healthy equilibrium?
6 13 17 22 25 29
question id: bird-grow-sheet-4
Essay: We like sustainable systems to be robust against disturbances. For instance, there might be a week of cloudy weather that reduces grass growth by half. Explain why or why not the situation with 22 cows is robust.
question id: bird-grow-sheet-essay-1
Soon after the disruption caused by the week of cloudy weather, the field again reaches a stable fixed point. What’s the biomass at this fixed point? Assume: you are still in the 22 cow scenerio.
less than 2 tons
6 tons
12 tons
greater than 12 tons
question id: bird-grow-sheet-5
After the disruption has passed and the system has again reached equilibrium, what will be the state of the 22 cows in the field?
well-fed
starving
in between
question id: bird-grow-sheet-6
Seeing the state of your 22 cows, you decide that you need to decrease the herd size to a level where the cows were well fed: 20 cows. What stable biomass fixed point will the system reach?
3 tons
12 tons
18 tons
25 tons
question id: bird-grow-sheet-7
You’re going to reduce the herd size still more to get things back to a healthy, stable equilibrium with well-fed cows. What’s the largest herd size that will accomplish this?
5
12
15
17
18
question id: bird-grow-sheet-8
At a herd size of 15 cows, about how many days will it take to get back (look at your end biomass for 20 cows) to a point where the cows are well fed? (Hint: How much will the biomass increase each day? The consumption curves starts to flatten out when the cows are well fed.)
about 2 days
about 5 days
about 10 days
about 20 days
question id: bird-grow-sheet-9
Like the previous question, but with 2 more cows. At a herd size of 17 cows, about how many days will it take to get back (look at your end biomass for 20 cows) to a point where the cows are well fed?
about 10 days
about 20 days
about 30 days
about 100 days
question id: bird-grow-sheet-10
Exercise 7MC_xref("fig-cow-consumption") shows a model of a cow’s consumption of vegetation as a sigmoid function of the amount of vegetation. In addition to the mathematics of the function, it is helpful to be able to translate the shape of the function into terms that make sense in the context of the model.
At what level of available biomass is the cow most hungry at the end of the day? (Hint: Think about how you would measure how hungry a cow is at the end of the day.)
2 tons 5 tons 10 tons 15 tons
question id: YKLh2c
Exercise 8 You and your older cousin are on a road trip. She rented a car that has not only “cruise control” (a technology from the 1970s that holds a constant speed without driver intervention) but also “car following,” that keeps the car a set distance \(D\) behind the car in front. Your cousin, knowing that you are a MOSAIC Calculus reader, asks you how the “car following” system works.
First, define some terms. You tell your cousin to denote the current, instantaneous distance from the car ahead as \(\xi\). You point out that when \(\xi - D > 0\), you’re a greater distance than \(D\) from the car ahead and therefore the velocity should be increased so you catch up. On the other hand, when you’re too close (\(\xi < D\)) you should decrease your velocity. The car-following system automates this, the relationship being \(\partial_t \xi = b (\xi - D)\).
Your cousin has never encountered a name like \(\xi\) so you decide to simplify. “Let \(x = \xi - D\), so \(x\) is positive if you are too far behind, zero when you’re at the right distance, and negative if you are too far ahead.” Conveniently \(\partial_t x = \partial_t \xi\), so you can write down the automatic relationship in terms of \(x\): \(\partial_t x = b x\) with \(b\) a positive number, such as 1.
Where is the fixed point of the dynamics \(\partial_t\, x = b x\)?
\(x=D\)\(x=0\)\(\xi = 0\) There is no fixed point.
question id: seal-fly-socks-1
Is the fixed point of \(\partial_t\, x = b x\) (with \(b > 0\)) stable?
Yes, that is why we can leave it to the automatic system.
No, the solution grows exponentially as \(e^{bt}\).
Yes, the solution decays exponentially as \(e^{bt}\)
question id: seal-fly-socks-2
Something’s wrong with the system you’ve sketched out. You want a stable following distance, doing the right thing if the car ahead speeds up or slows down, but your system is unstable.
Which of the following rules will have a stable fixed point at \(x=0\)?
\(\partial_t\, x = -b x\) (with \(b > 0\)) \(\partial_t\, x = b^2 x\)\(\partial_t\, x = b x^2\)\(\partial_t\, x = 0 x\)
question id: seal-fly-socks-3
The word “feedback” is used to describe systems where the change in the state is a function of the state. “Negative feedback” is when the change is negative when the state is positive, as in \(\partial_t\, x = -b\, x\). Negative feedback is desirable when you want to keep things stable. “Positive feedback” is when the change is the same sign as the state, as in \(\partial_t\, x = b\, x\) and makes things unstable.
Activities
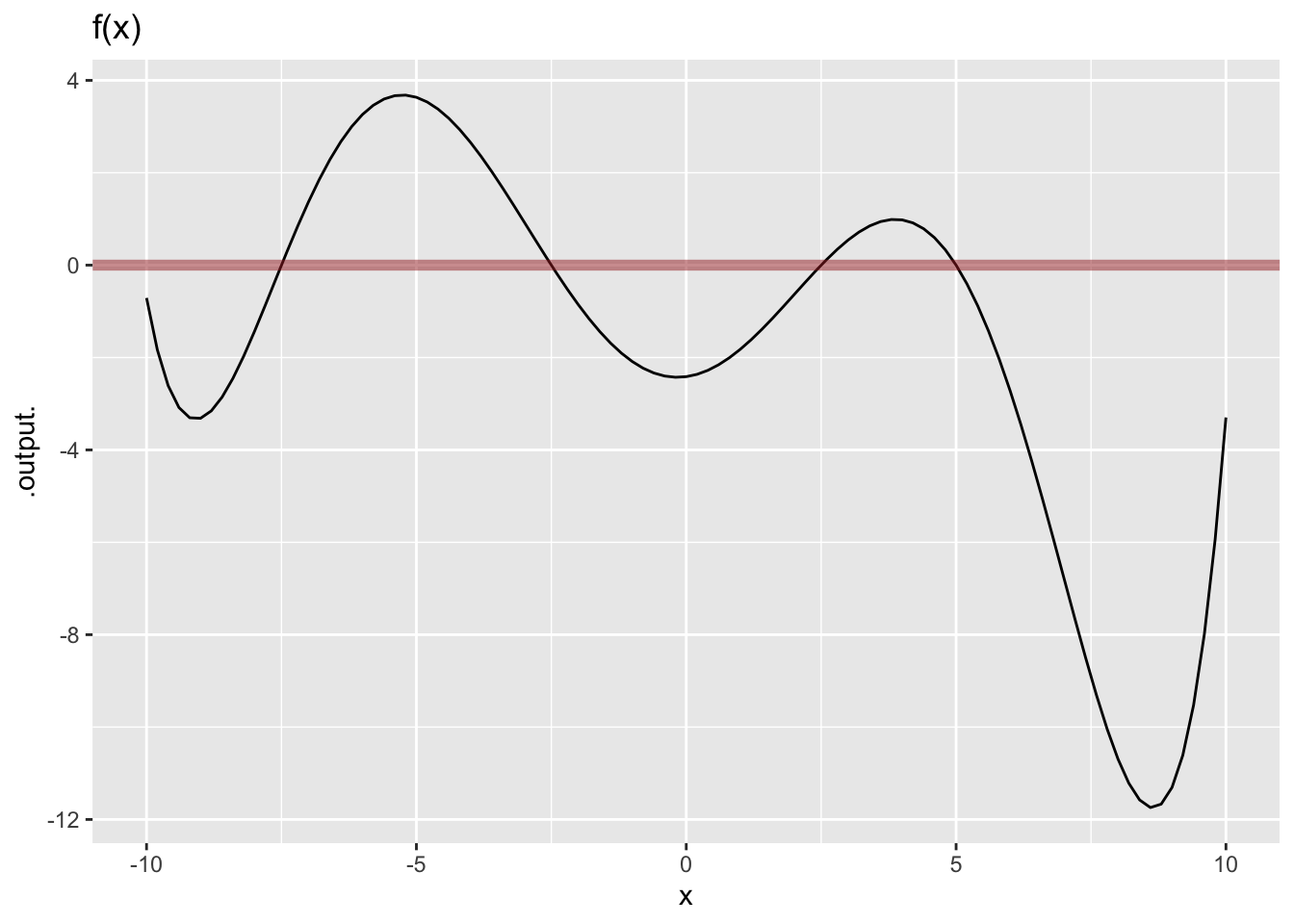
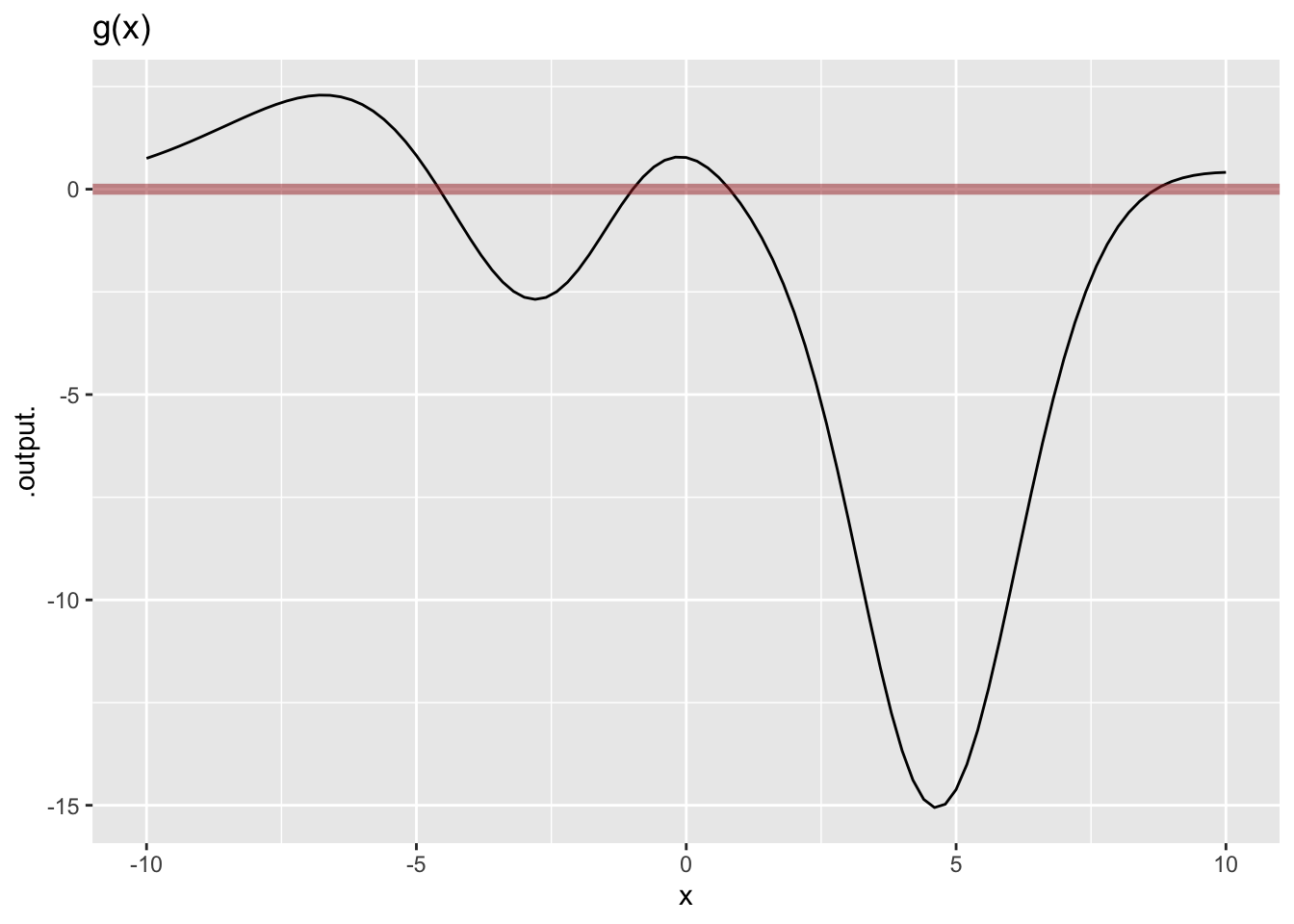
Exercise 9 The graphs below show two dynamical functions, \(f(x)\) and \(g(x)\), in the two differential equations \(\partial_t x = f(x)\) and \(\partial_t x = g(x)\).
Warning: Using `size` aesthetic for lines was deprecated in ggplot2 3.4.0.
ℹ Please use `linewidth` instead.
For function \(f(x)\),
locate all of the fixed points in the domain \(-10 \leq x \leq 10\) and determine whether each one is stable or not
find the state value \(x\) where the state is growing the fastest.
find the state value \(x\) where the state is decreasing the fastest.
Answer the questions in (a) but for \(g(x)\).
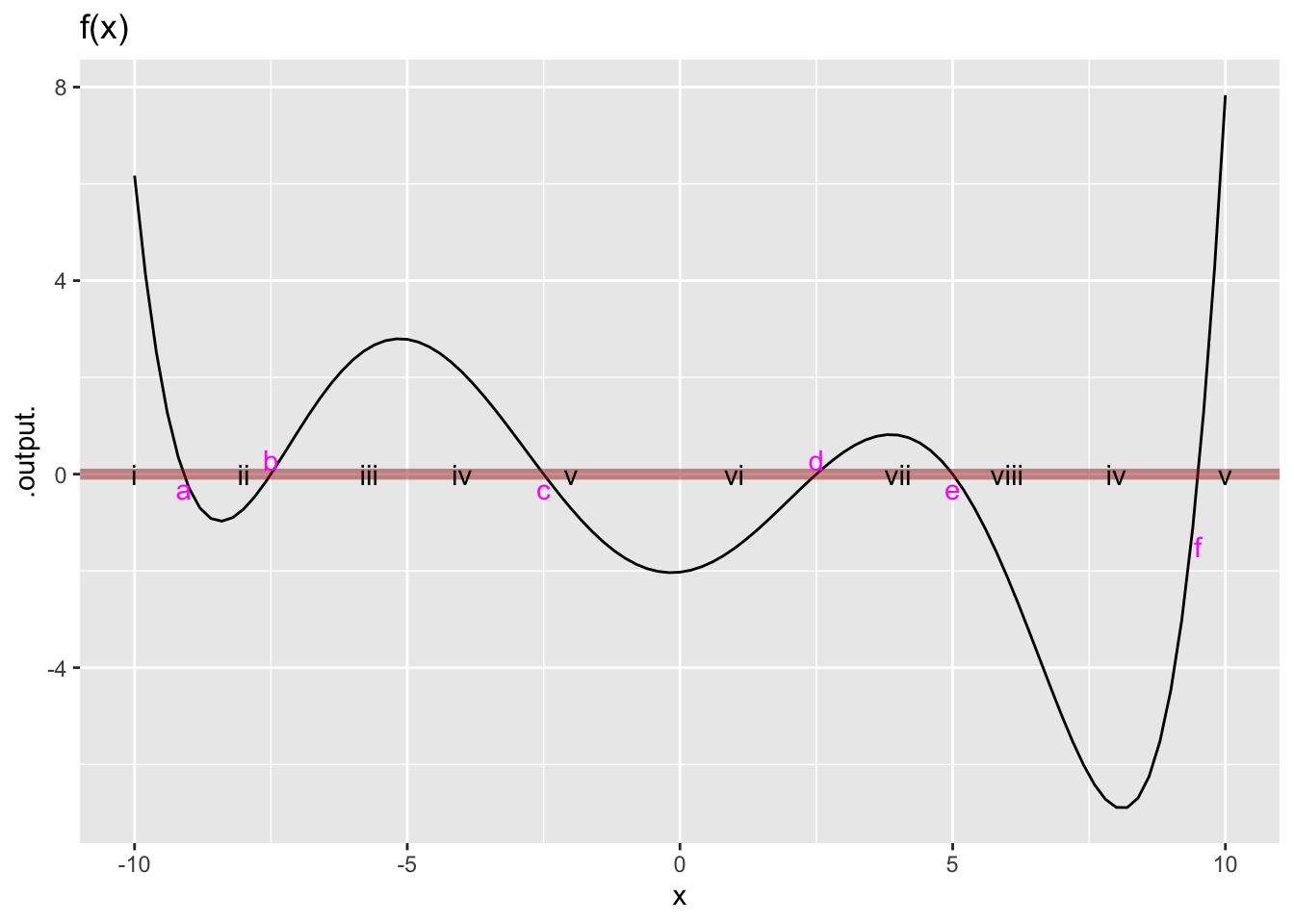
Exercise 10 The dynamical function in the graph is a sixth-order polynomial. It has several fixed points, labelled “a”, “b”, “c”, and so on.
The numbers i, ii, iii, etc. mark some initial conditions.
For each of the initial conditions marked in the graph, say whether the long-term behavior of the trajectory from that point will lead to one of the fixed points (and which one) or to \(-\infty\) or \(\infty\). (Hint: That the function is a sixth-order polynomial should tell you something about the functions behavior beyond the domain shown in the graph.)
Exercise 11 Here is a generic, linear differential equation:
\[\partial_t x = a x + b\ .\] 1. How many fixed points are in this system?
For one of the fixed points you identified in (1), what is the value for the location \(x^\star\) in terms of the parameters \(a\) and \(b\)?
For one of the fixed points, translate the equation to be in terms of \(y\) in \[\partial_t y = ???\ .\]
Write down the symbolic solution to the equation in (3). (Hint: it will involve the parameter \(a\) but not \(b\).)
Translate the solution in (4) back into terms of \(x\). (Hint: The solution will involve both parameters \(a\) and \(b\).)
Exercise 12 Use differentiation to verify that \[y(t) = 4 e^{2 t} + 7\] is a solution to the differential equation \[\partial_t y = 2 y - 14\ .\]
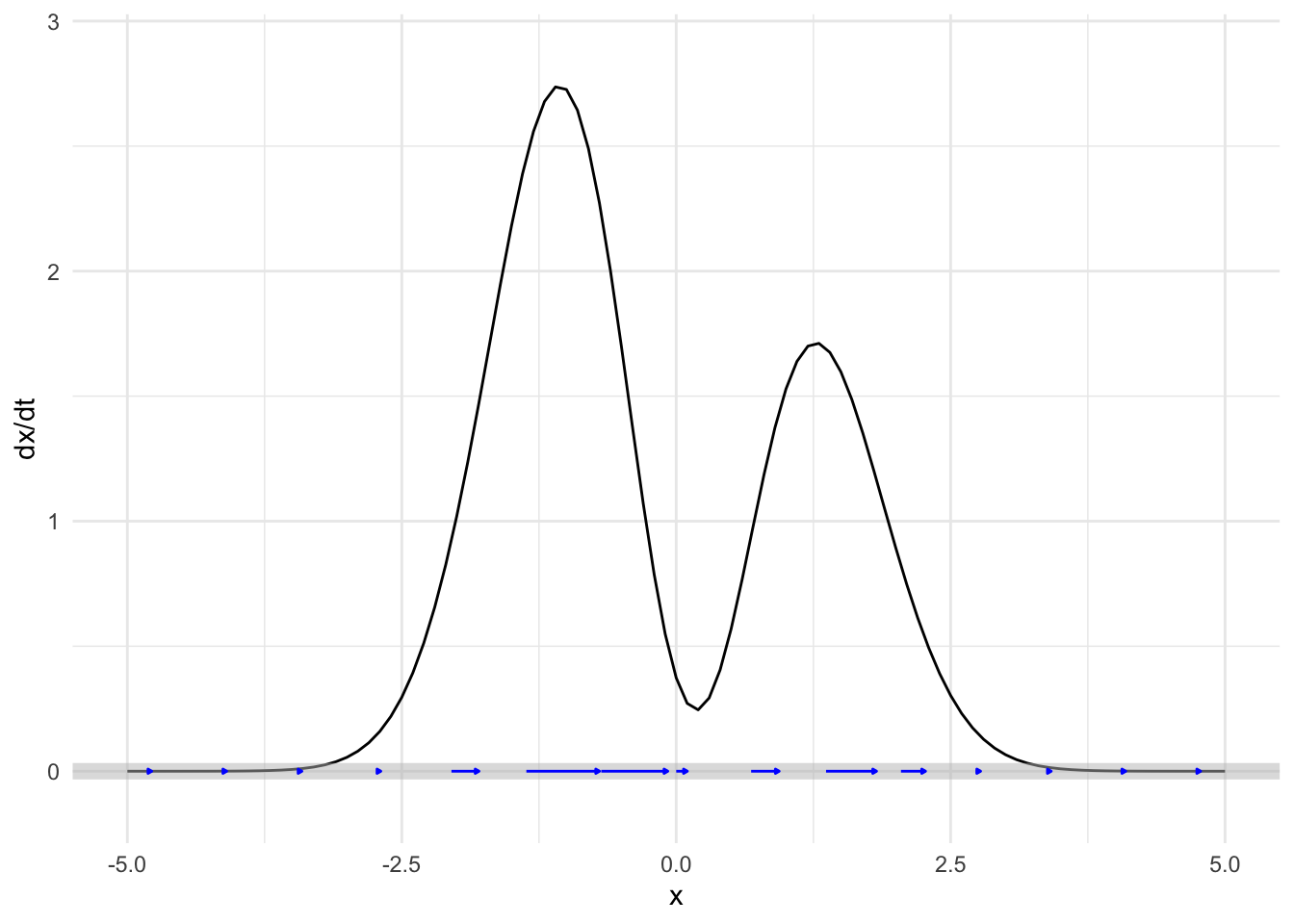
Exercise 13
For the dynamical system graphed above, sketch a plausible time series solution starting from initial condition \(x_0=-2.5\).
Exercise 14
Suppose that \(p(t)\) is the population density of squirrels over time. Draw the dynamical function \(s(p)\) in the differential equation \[\partial_t p = s(p)\] that will produce a population that grows from a very small density of 4 squirrels per hectare to a carrying capacity of 50 squirrels per hectare. Mark the units on your graph.
Challenge: Arrange the units on the output of \(s(p)\) so that it will take roughly 3 months to reach the carrying capacity.
Exercise 15 Coffee at an initial temperature of \(T=\) 80 degrees C is in a closed thermos at a (very cold) construction site where the ambient temperature is -20 C. Suppose, with the thermos closed, it takes 4 hours for the coffee to fall to a tepid 30 degrees C. The thermos cools in accord with Newton’s Law of Cooling.
Draw a quantitatively reasonable graph of the dynamical function consistent with these facts in the differential equation \[\partial_t T = f(T)\ .\]
Exercise 16 A first-order dynamical system \(\partial_t x = g(x)\) can have any number of fixed points, depending on the shape of \(g(x)\).
A. Draw a graph of a \(g(x)\) that has seven fixed points.
B. Explain why, when there are multiple fixed points, a stable fixed point will have a neighboring fixed point that is unstable, and vice versa.
Exercise 17 A debit card is a way to make withdrawals from a bank account. Funds in the account earn interest. In the economic environment of 2021, the interest rate is practically zero. But to make it possible to see the growth on a graph, we will stipulate it to be 4% per year. But if the account is in debt, then the debt grows at a much faster rate, perhaps 15% per year.
Suppose the amount in the bank account is \(m\) (in dollars) and time is \(t\) (in years). If \(m\) is positive, you are earning interest. If negative, you are in debt and the debt will grow.
Which of the following graphs reflects the dynamics of the system?
Figure 1: Scenarios A and B
Figure 2: Scenarios C and D
On the graph paper below, sketch out the modifications of the bank-card dynamics described. Identify any fixed points by marking them on the graph and say if they are stable or unstable.
) )
In addition to the normal bank-card dynamics, your employer makes a steady retirement deposit into your account at the rate of $100 per year.
Your darling aunt looks at your account balance. If you have less than $300 in your account, she will add money daily at a rate of $100 per year. Otherwise, she does nothing.


 )
)