traj <- integrateODE(dx ~ x + y, dy ~ 2*x, # dynamics
x=-1.1, y=2.1, # initial conditions
domain(t=0:2))
traj_plot(y(t) ~ x(t), traj)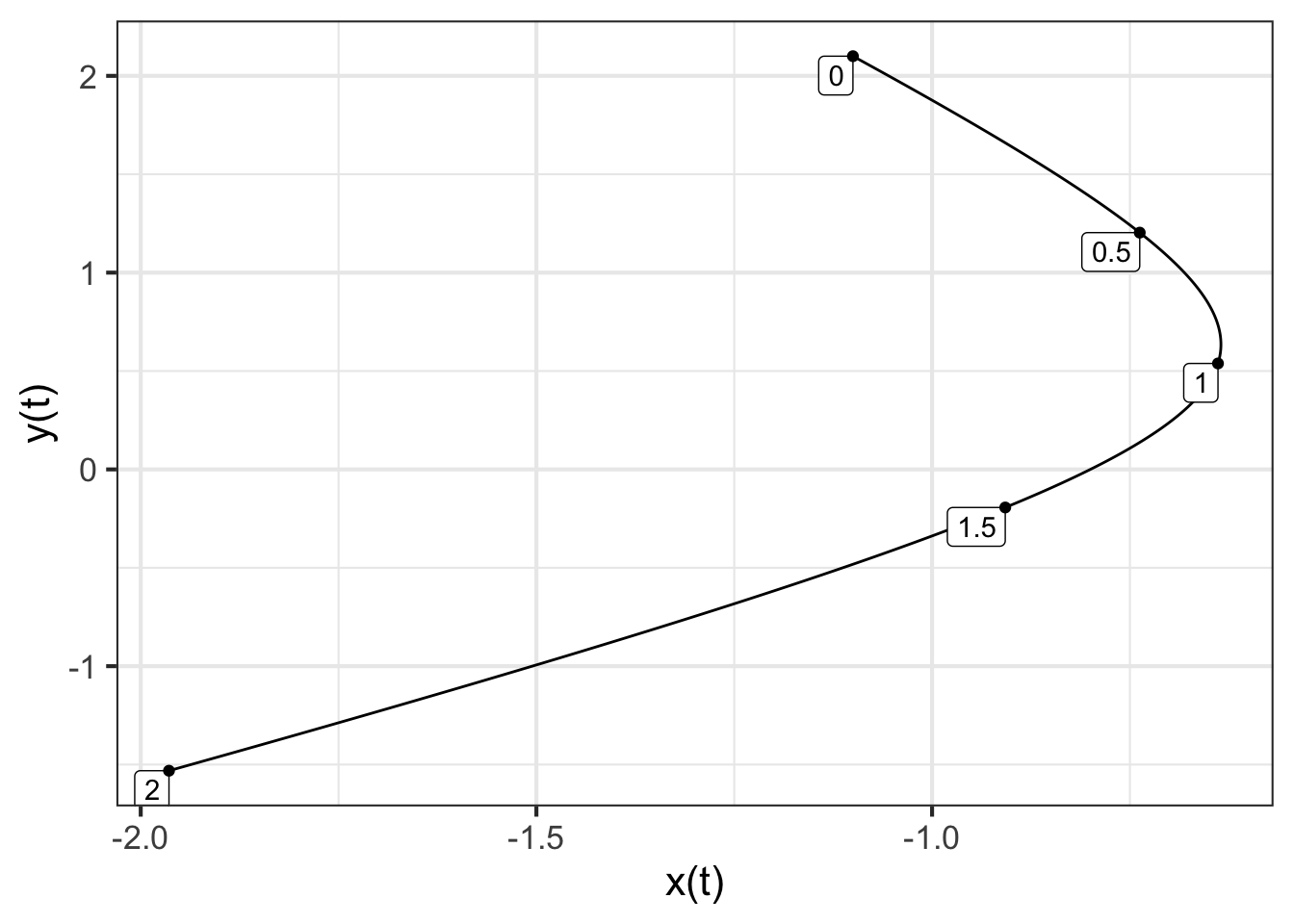
In the previous chapters, you’ve seen how linear dynamics, when unstable, lead trajectories off to infinity. Chapter 44 looked at some ways that nonlinearity can tame instability, as in the simple models of linear growth.
In this chapter, we return to linear dynamics to develop a quantitative theory of stability. Such theory is important in many engineering and design applications. For instance, a building exposed to earthquake risk can be economically designed to be strong specifically against the type of shaking produced by earthquakes. An electronic circuit can be designed to be sensitive to certain kinds of communication signals while still resisting noise or jamming.
The form in which we have been writing linear differential equations in two state variables is \[\begin{eqnarray} \partial_t x & = a x + b y\\ \partial_t y & = c x + d y\ . \end{eqnarray}\]
A key part of constructing a theory of stability is finding a set of mathematical ideas that enable us to view dynamics in a simpler way. The idea we will introduce here is thinking about the state and trajectory of a differential equation in terms of vectors. We will work here with systems with a two-variable dynamical state, but the results apply just as well to higher dimensional states. That is important in applied work, where the systems being modeled are complicated with many state components.
We can re-write the linear differential equation using vector and matrix notation. Suppose that we collect the \(x\) and \(y\) components of the state into a vector, \[\vec{w(t)} =\left[\begin{array}{c}x(t)\\y(t)\end{array}\right]\ .\] The differential equation, in terms of \(\vec{w(t)}\) is \[\partial_t \vec{w(t)} = \left[\begin{array}{cc}a&b\\c&d\end{array}\right] \vec{w(t)}\ .\] Now imagine that we pick two non-colinear vectors, \(\vec{u_1}\) and \(\vec{u_2}\) that span the state space. Since the vectors are assumed to span the state, any initial condition can be written as a linear combination of those two vectors: \[\vec{w(0)} =\left[\begin{array}{c}x(0)\\y(0)\end{array}\right] = m_1 \vec{u_1} + m_2 \vec{u_2}\ .\]
For the moment, we won’t worry about how best to choose \(\vec{u_1}\) and \(\vec{u_2}\); any two vectors that are not colinear will do.
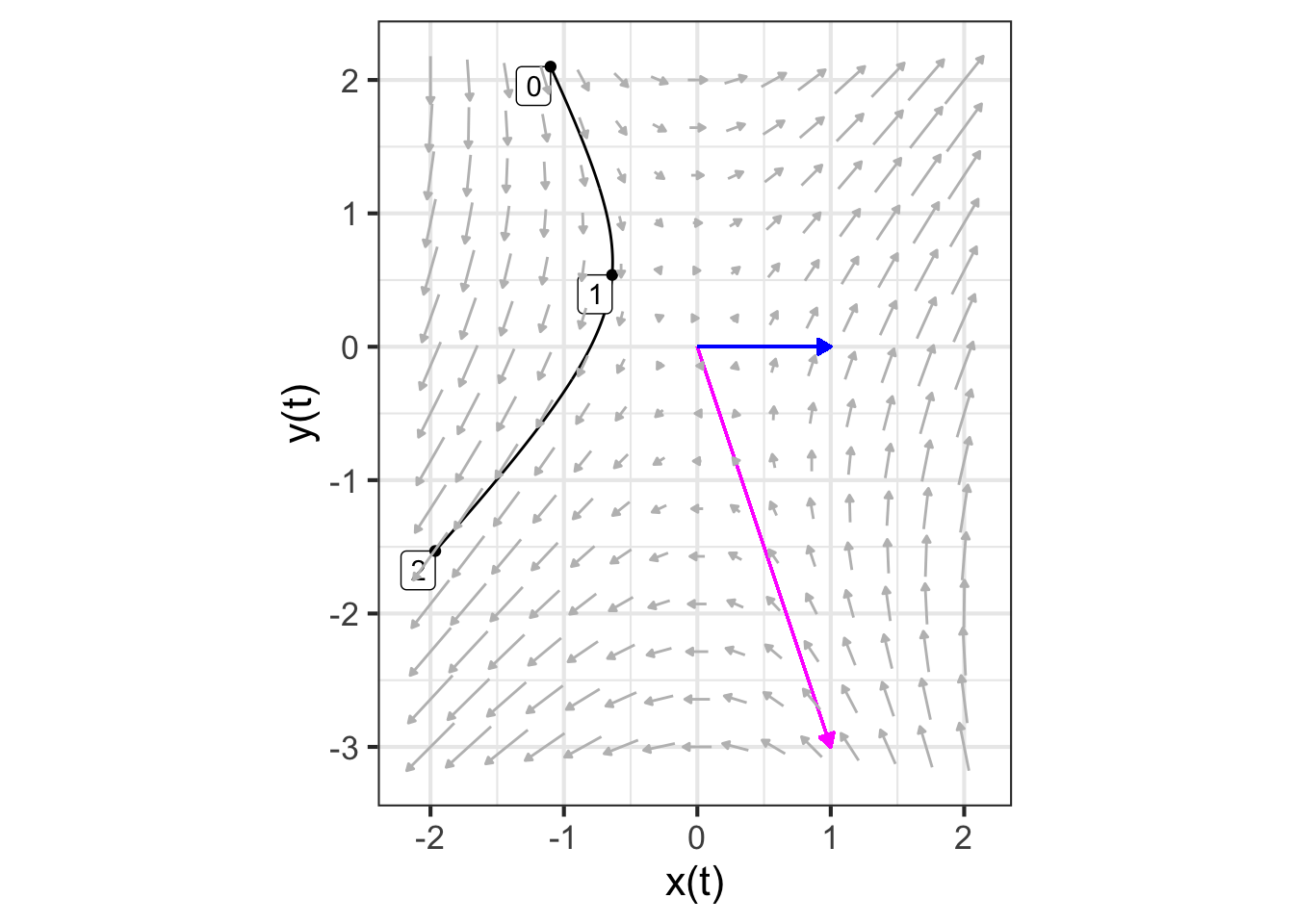
As a running example, we will work with the pair of first-order differential equations \[\begin{eqnarray} \partial_t x &= x + y\\ \partial_t y &= 2 x \ ,\\ \end{eqnarray}\] which, in vector/matrix form are \[\partial_t \vec{w(t)} = \left[\begin{array}{cc}1&1\\2&0\end{array}\right] \vec{w(t)}\ .\] Imagine that we choose, arbitrarily, \[\vec{u_1} = \color{magenta}{\left[\begin{array}{r}1\\-3\end{array}\right]}\ \ \ \text{and}\ \ \ \vec{u_2} = \color{blue}{\left[\begin{array}{r}1.0\\0\end{array}\right]}\ .\]
For the example, we will calculate a trajectory starting at the initial condition \(\vec{w(0)} = \left[\begin{array}{r}-1.1\\ 2.1\end{array}\right]\):
traj <- integrateODE(dx ~ x + y, dy ~ 2*x, # dynamics
x=-1.1, y=2.1, # initial conditions
domain(t=0:2))
traj_plot(y(t) ~ x(t), traj)
The initial condition (marked “0” in Figure 46.1 is, like any other point in the state space, a linear combination of \(\vec{u_1}\) and \(\vec{u_2}\). We can find the scalar coefficients of the linear combination using any of the methods presented in Block 5, for instance the telescope method. We will illustrate with qr.solve():
So, \(\vec{w(0)} = -0.7 \vec{u_1} - 0.4 \vec{u_2}\). Keep these scalar coefficients, \(-0.7\) and \(-0.4\) in mind for the next example.
We can use integrateODE() to find the solution starting at any initial condition. In particular, we can find the solution \(\vec{u_1}\) as the initial condition and, similarly, using \(\vec{u_2}\) as the initial condition.
traj_u1 <- integrateODE(
dx ~ x + y, dy ~ 2*x, # dynamics
x=1, y=-3, #initial conditions
domain(t = 0:2))
traj_u2 <- integrateODE(
dx ~ x + y, dy ~ 2*x, #dynamics
x=1, y= 0, #initial conditions
domain(t = 0:2))Figure 46.2 shows these trajectories.
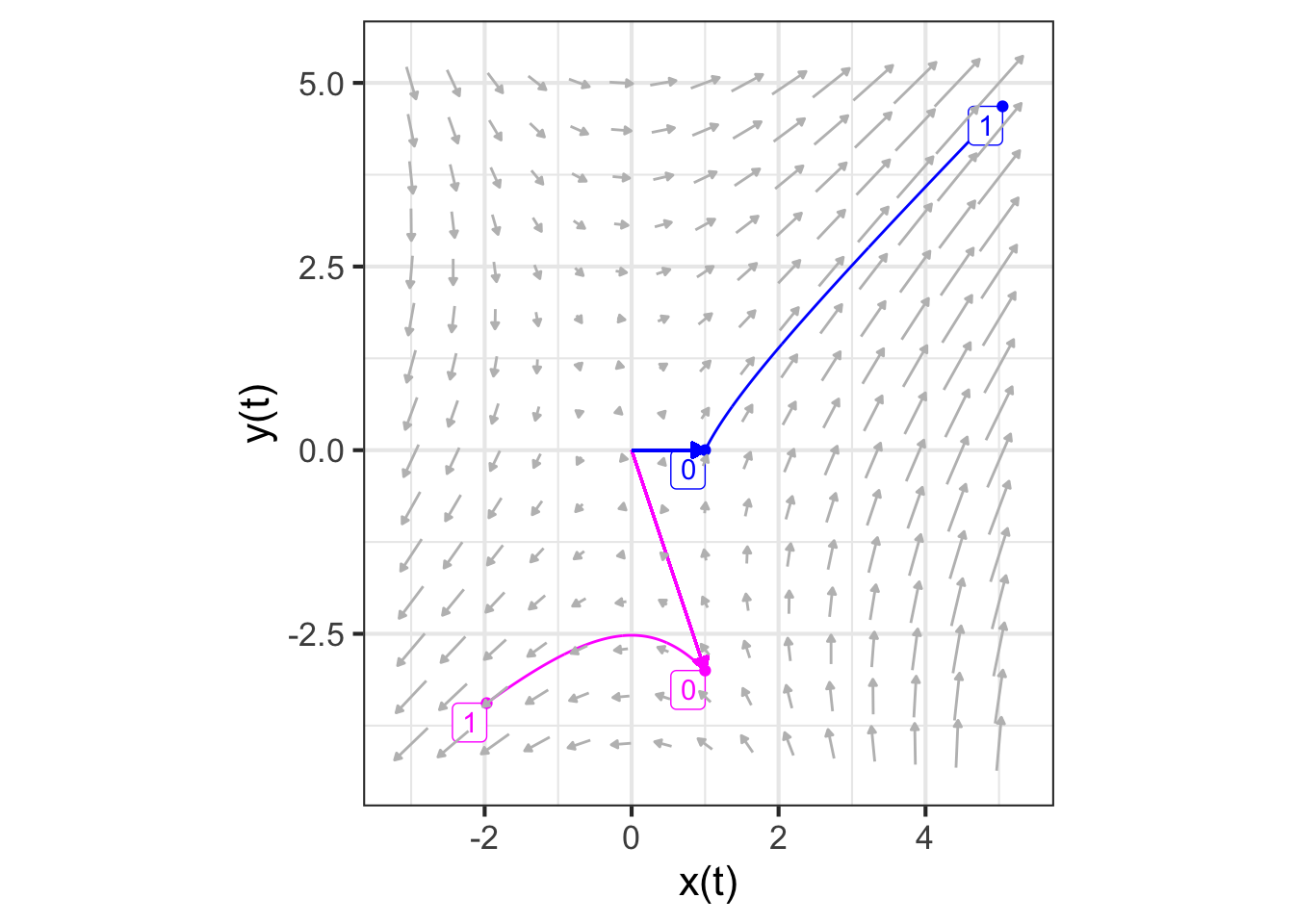
At first glance, the two trajectories \(\vec{u_1(t)}\) and \(\vec{u_2(t)}\) in Figure 46.2 that start from \(\vec{u_1}\) and \(\vec{u_2}\) might not look much like the trajectory in Figure 46.1 that starts from \(\vec{w(0)} = -0.7 \vec{u_1} - 0.4 \vec{u_2}\). But in fact there is a very simple relationship between the trajectories: \[\vec{w(t)} = -0.7 \vec{u_1(t)} - 0.4 \vec{u_2(t)}\ .\] To state the situation more generally, any solution to the differential equations can be written as a linear combination of the solutions starting at \(\vec{u_1}\) and \(\vec{u_2}\), regardless of how \(\vec{u_1}\) and \(\vec{u_2}\) were chosen.
We can see this algebraically. Since \(\vec{u_1(t)}\) and \(\vec{u_2(t)}\) are solutions to the linear differential equation, it must be that \[\partial_t \vec{u_1(t)} = \left[\begin{array}{cc}1&1\\2&0\end{array}\right] \vec{u_1(t)}\ \ \text{and}\ \ \partial_t \vec{u_2(t)} = \left[\begin{array}{cc}1&1\\2&0\end{array}\right] \vec{u_2(t)}\ .\] Taking a linear combination of these equations gives
\[\partial_t \left[m_1\, \vec{u_1(t)} + m_2 \vec{u_2(t)}\right] = \left[\begin{array}{cc}1&1\\2&0\end{array}\right] \left[m_1\, \vec{u_1(t)} + m_2 \vec{u_2(t)}\right]\] The same will be true in general, that is, for the matrix \(\left[\begin{array}{cc}a&b\\c&d\end{array}\right]\).
In the previous section, we saw that the solution to any linear differential equation starting at any initial condition can be written as a linear combination \(m_1 \vec{u_1(t)} + m_2 \vec{u_2(t)}\), where \(\vec{u_1(t)}\) is the solution starting at an initial condition \(\vec{u_1}\) and \(\vec{u_2(t)}\) is the solution starting at \(\vec{u_2}\). It does not matter how \(\vec{u_1}\) and \(\vec{u_2}\) are chosen, so long as they are not colinear, that is, so long as they span the state space.
In this section, we demonstrate that there is a particular way of selecting \(\vec{u_1}\) and \(\vec{u_2}\) that makes the solutions \(\vec{u_1(t)}\) and \(\vec{u_2(t)}\) have a very simple, purely exponential format. The vectors to be chosen are the eigenvectors of the matrix \(\left[\begin{array}{cc}a&b\\c&d\end{array}\right]\). We will call these eigenvectors \(\vec{\Lambda_1}\) and \(\vec{\Lambda_2}\). (This use of the Greek letter \(\Lambda\) (capital “lambda”) and it is lower-case version \(\lambda\), is conventional in mathematics, physics, and engineering. So it is worth learning to identify the letters.)
Our task in this section is to show how to compute the eigenvectors \(\vec{\Lambda_1}\) and \(\vec{\Lambda_2}\) and that the solutions \(\vec{\Lambda_1(t)}\) and \(\vec{\Lambda_2(t)}\) are in fact simple exponentials. Chapter 47 derives the formula for the eigenvectors. Here, we use the R function eigen() to do the calculations for us.
We can see what’s special about \(\vec{\Lambda_1}\) and \(\vec{\Lambda_2}\) by plotting them along with the flow field, as in Figure 46.3.
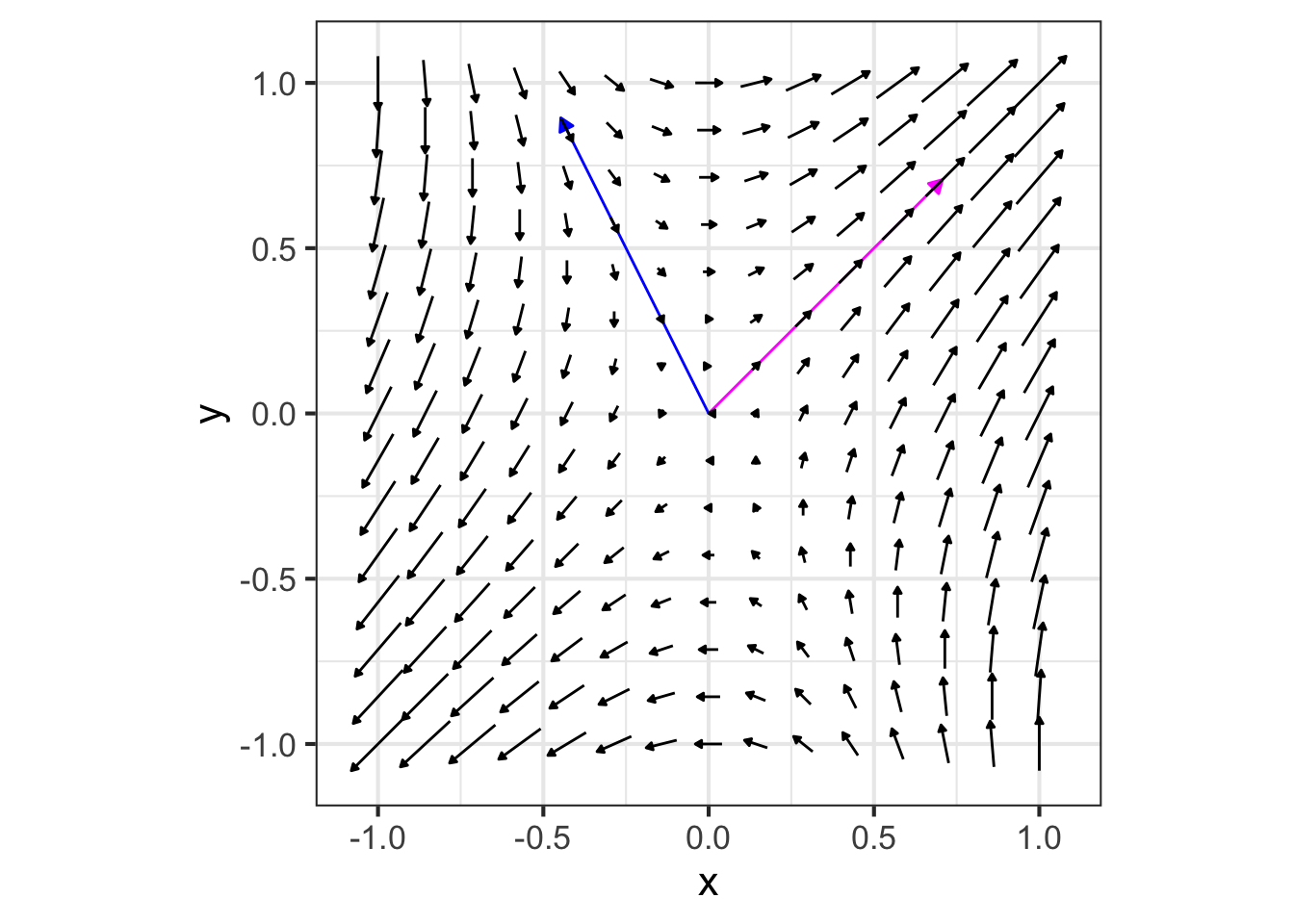
The eigenvectors mark the directions where the flow is either directly toward the fixed point or directly away from it. Here, the flow on the subspace of \(\color{magenta}{\vec{\Lambda_1}}\) is away from the fixed point, while the flow along the subspace of \(\color{blue}{\vec{\Lambda_2}}\) is inward to the fixed point.
The consequence of this alignment of the flow with the eigenvectors is that the trajectory from any initial condition \(m_1 \vec{\Lambda_1}\) will have the form \(m_1(t) \vec{\Lambda_1}\) and similarly for an initial condition \(m_2(t) \vec{\Lambda_2}\).
As we did in the previous section, let’s calculate the trajectories \(\color{magenta}{\vec{\Lambda_1(t)}}\) and \(\color{blue}{\vec{\Lambda_2(t)}}\) starting at the two eigenvectors and plot out the \(y(t)\) component of the solution. Since we are anticipating an exponential form for the function, we use semi-log axes, where an exponential looks like a straight line.
traj_eigen1 <- integrateODE(
dx ~ x + y, dy ~ 2*x, # dynamics
x = 0.7071, y = 0.7071, # initial conditions
domain(t = 0:1)
)
## Solution containing functions x(t), y(t).
traj_eigen2 <- integrateODE(
dx ~ x + y, dy ~ 2*x, # dynamics
x=-0.4472, y=0.8944, # initial conditions
domain(t = 0:1))
## Solution containing functions x(t), y(t).traj_plot(y(t) ~ t, traj_eigen1, color="magenta") |>
traj_plot(y(t) ~ t, traj_eigen2, color="blue") |>
gf_refine(scale_y_log10(
breaks=c(0.3290, 0.7071, 0.8944, 5.2248)))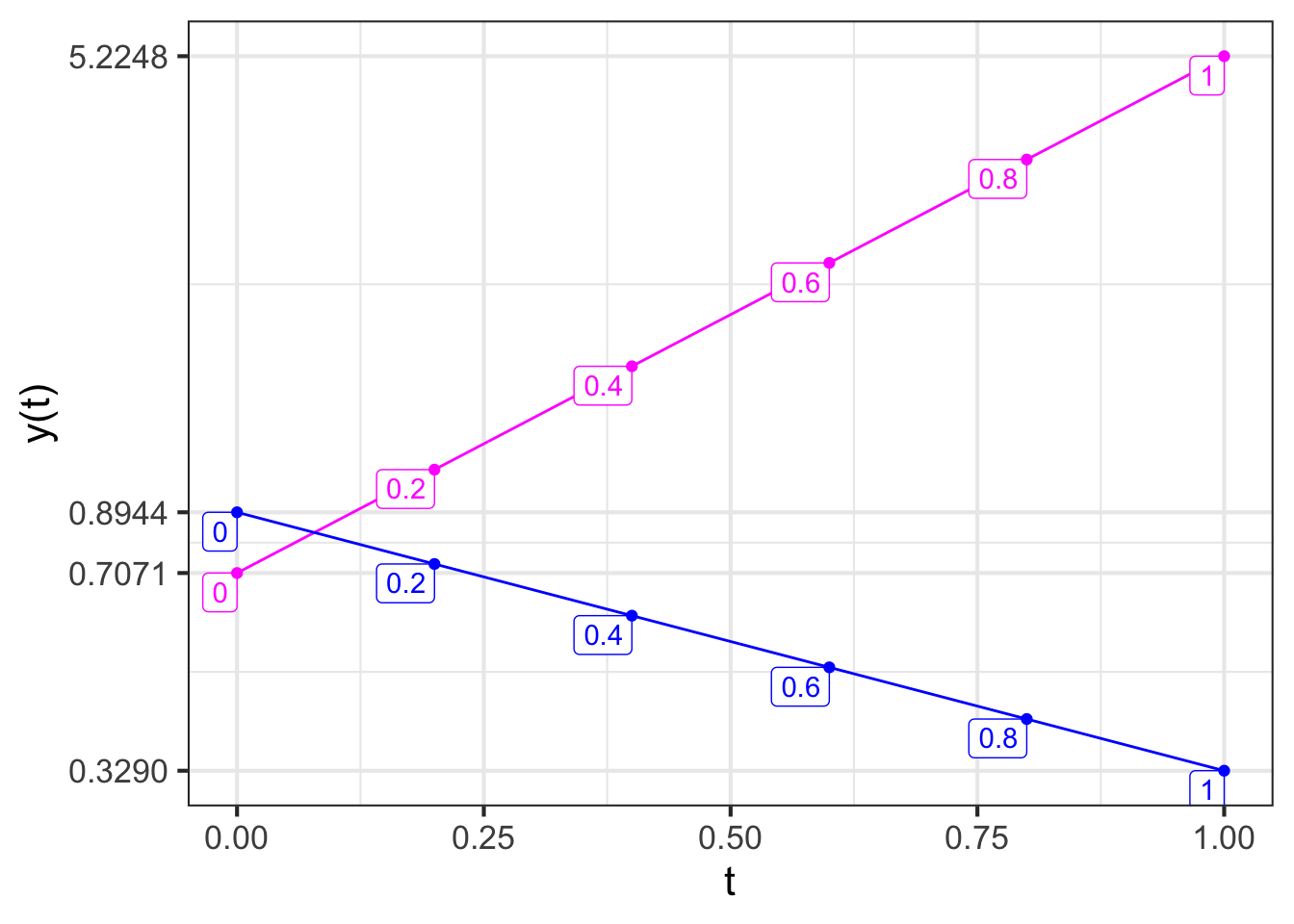
We have marked the \(y\) axis with the starting and ending values of each function, so that you can find the exponential parameter \(k\) for each function.
\(\color{magenta}{y_1(t) = 0.7071 e^{k_1 t}}\)
\(\color{blue}{y_2(t)} = 0.8944 e^{k_2 t}\).
To find \(k_1\) and \(k_2\), plug in \(t=1\) to the solution:
\(\color{magenta}{y_1(1) = 5.2248 = 0.7071 e^{k_1}} \implies k_1=2\)
\(\color{blue}{y_2(1) = 0.3290 = 0.8944 e^{k_2}} \implies k_2 = -1\)
Look back at the results from the eigen(M) calculation. These values for \(k_1\) and \(k_2\) are exactly the eigenvalues that were computed from the matrix M. In standard notation, rather than \(k_1\) and \(k_2\), the notation \(\lambda_1 = k_1\) and \(\lambda_2 = k_2\) is preferred. (Remember, \(\lambda\) is the Greek letter “lambda” in it is lower-case form.) Every solution to the differential equation has the form \[m_1\, e^{\lambda_1 t} \vec{\Lambda_1} + m_2\, e^{\lambda_2 t} \vec{\Lambda_2}\ .\] The scalar coefficients \(m_1\) and \(m_2\) can be found from the initial condition. The stability of the system depends only on \(\lambda_1\) and \(\lambda_2\). If either one of these is positive, then the system is unstable.